Cette page donne des détails sur les widgets qui se trouvent dans la sous-section «Navigation». Ils sont accessibles en personnalisant les pages XCTrack Pro préinstallées sur AIR³. N'oubliez pas que vos personnalisations seront perdues si vous réinitialisez l'interface XCTrack Pro avec le AIR³ Manager, si vous modifiez le profil (Kiss, Easy, Expert, Paramotor) ou si vous chargez un fichier de configuration différent «xcfg».
Cliquez sur le signe + pour lire les détails.
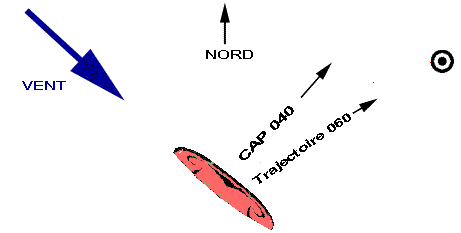
Affichage graphique de diverses informations sur la direction, telles que le nord, le vent et la navigation.
Le widget vous donne le choix de ce qui est affiché:
- la direction de la cible (voir ci-dessous “afficher la flèche”)
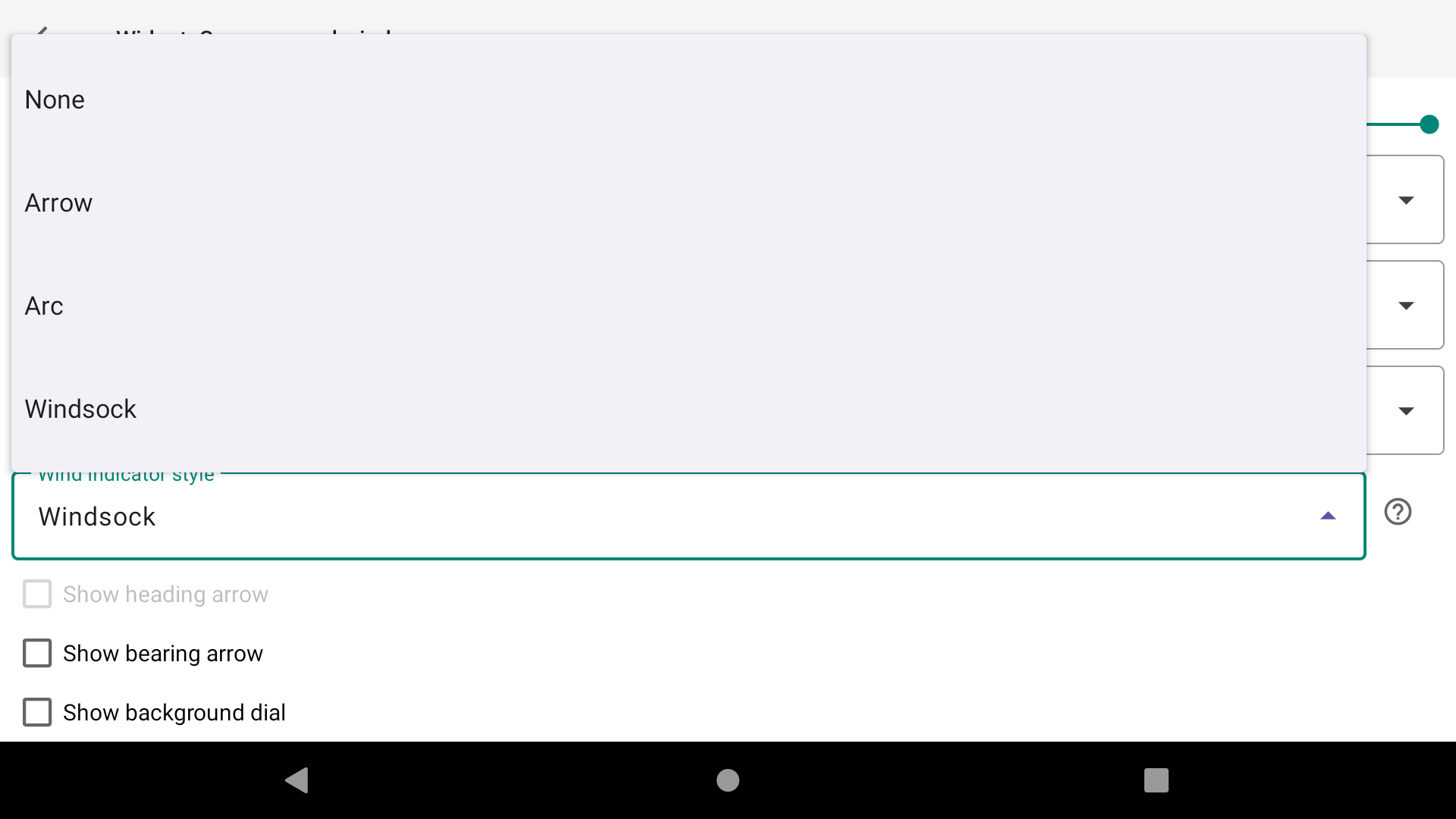
- the wind direction (“Wind indicator style”)
- la direction du cap ("montrer la flèche de cap")
- la direction de la trajectoire ("montrer la flèche de trajectoire")
- Un cadran d'arrière-plan ("afficher le cadran d'arrière-plan"), y compris le Nord.
VENT
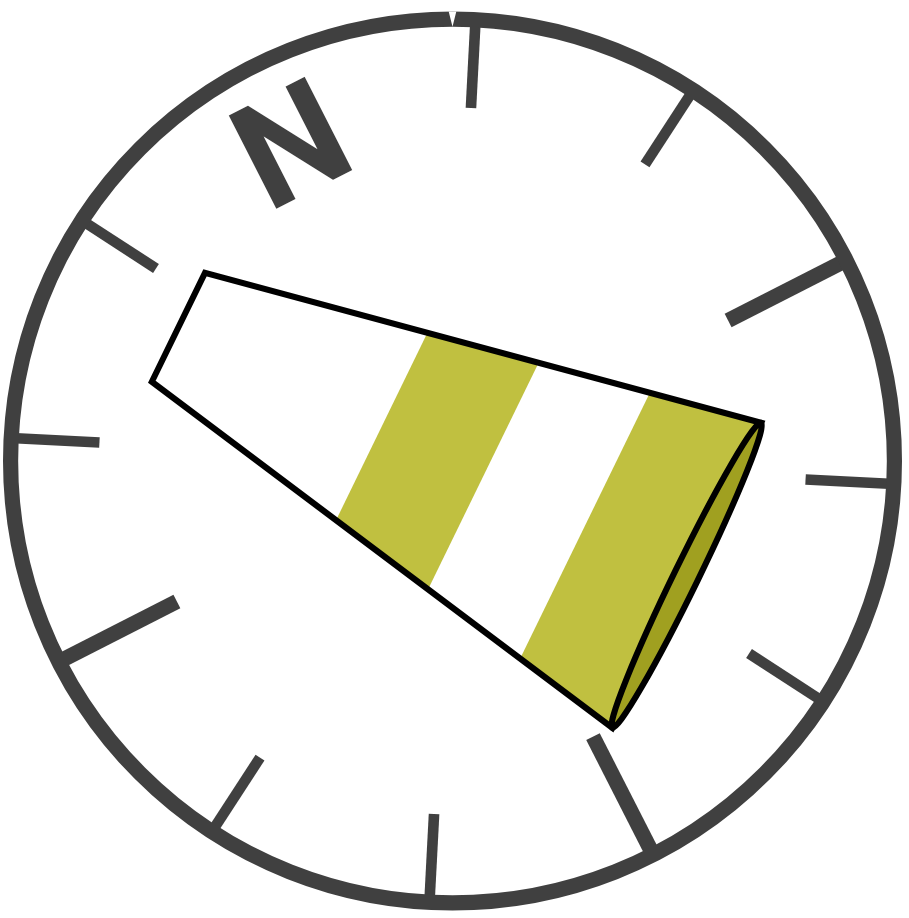
Pour afficher la direction du vent, plusieurs options s'offrent à vous : une flèche, un arc ou une manche à air.

Selon les réglages, vous pourriez déterminer graphiquement l’influence du vent sur la trajectoire.
Si le pilote vole vent de face ou contre le vent, la direction du cap et la direction de la trajectoire seront les mêmes. Par conséquent, les flèches indiquent directement le haut de la boussole, sauf si vous avez décidé de définir le nord en haut.
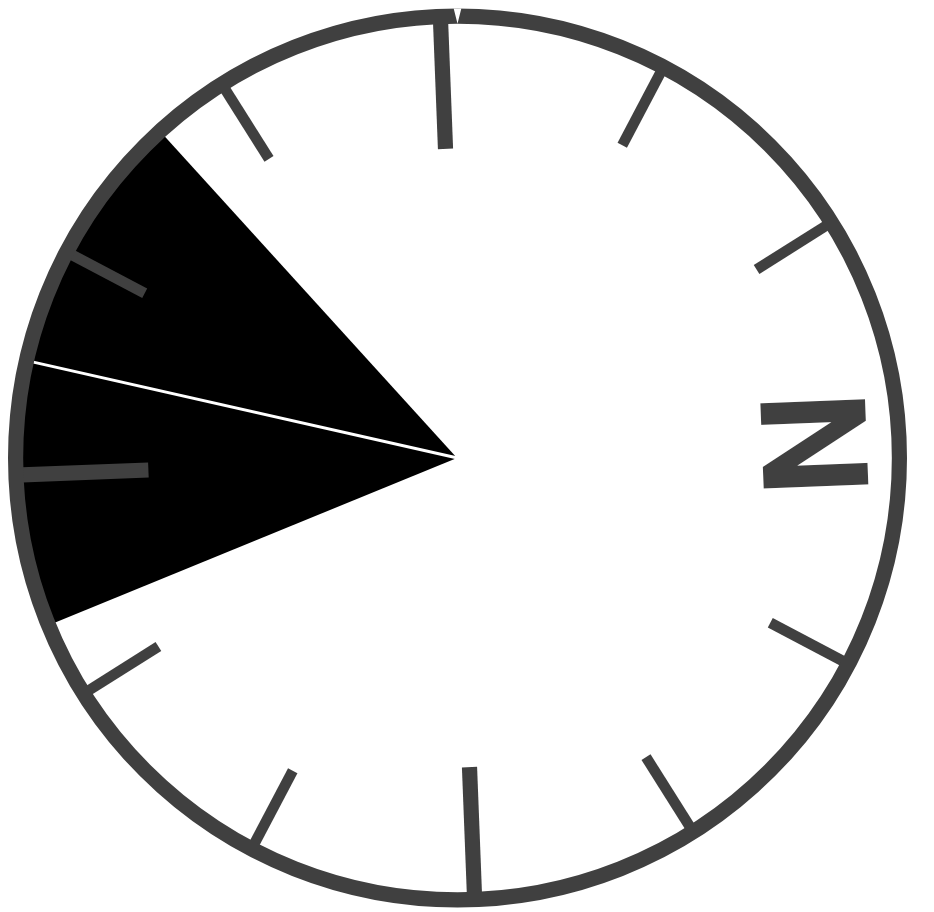
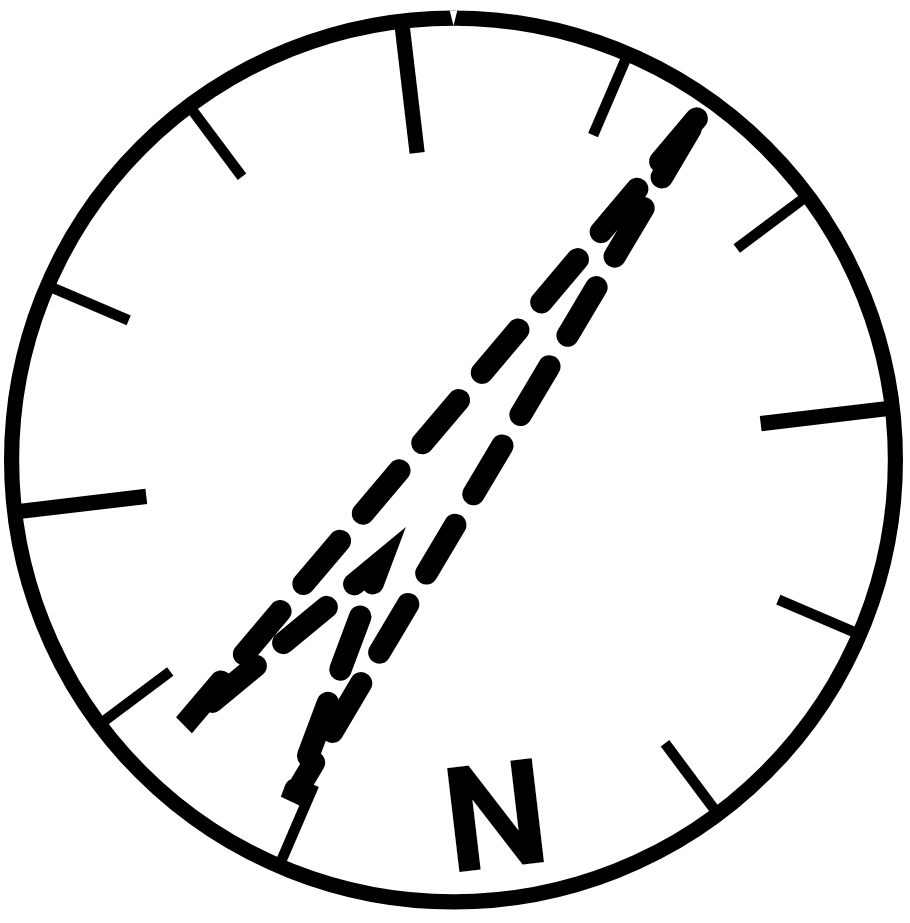
Si le pilote vole à 90 ° du vent, plus le vent est fort, plus la différence entre la direction du cap et la direction de la trajectoire sera grande. En configurant le cadran d’arrière-plan avec le cap en haut, affichant la flèche de la trajectoire, vous verrez la flèche de direction qui n’indiquera pas le sommet car le vent modifie la trajectoire. La même chose se produira en réglant la trajectoire en haut et en affichant la flèche de cap.
Cette boussole, par exemple, indique la direction de la trajectoire alors que la boussole est configurée pour avoir le cap en haut.

En positionnant le nord en haut, vous pouvez afficher les flèches de cap et de trajectoire. Dans ce cas, vous verrez directement la différence entre ces deux flèches.


Trajectoire et cap
Voici un petit rappel pour mieux comprendre les notions de trajectoire et de cap :
Par défaut, XCTrack utilise la trajectoire/direction de la trace grâce au GPS, la vitesse et la direction du vent pour calculer la direction du cap.
En activant « Utiliser la boussole interne » dans Menu/Préférences/Connexion & capteurs/, XCTrack utilise les informations provenant de la boussole interne pour afficher le cap.
Nous vous déconseillons d'utiliser la boussole intégrée, car elle nécessite un étalonnage régulier pour afficher des informations correctes.
En savoir plus sur l'utilisation de la boussole interne dans la page Préférences du Manuel XCTrack Pro.
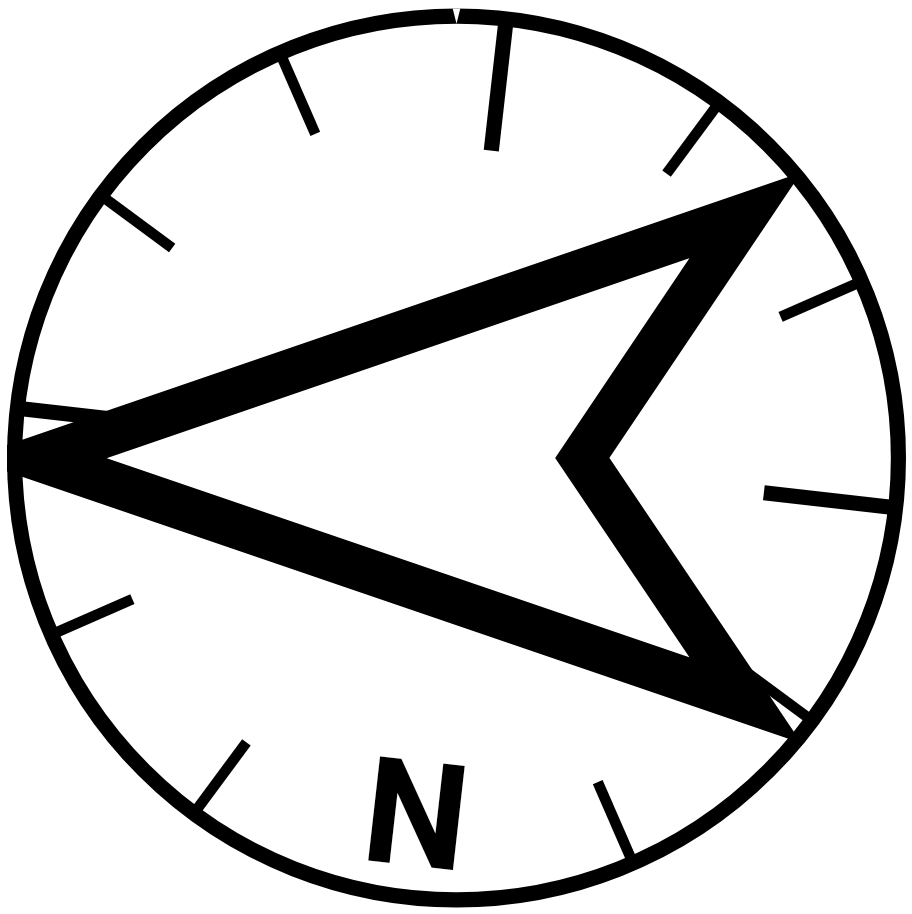
Selon le thème choisi (noir, blanc, eInk), les flèches peuvent s'afficher de différentes manières :
Flèche de navigation pour vous indiquer la direction à suivre.
Avec le cadran d’arrière-plan, à moins que vous ne choisissiez de garder le nord en haut, le petit triangle plein indique la direction du nord.
eInk
Blanc ou Noir
eInk

Blanc ou Noir

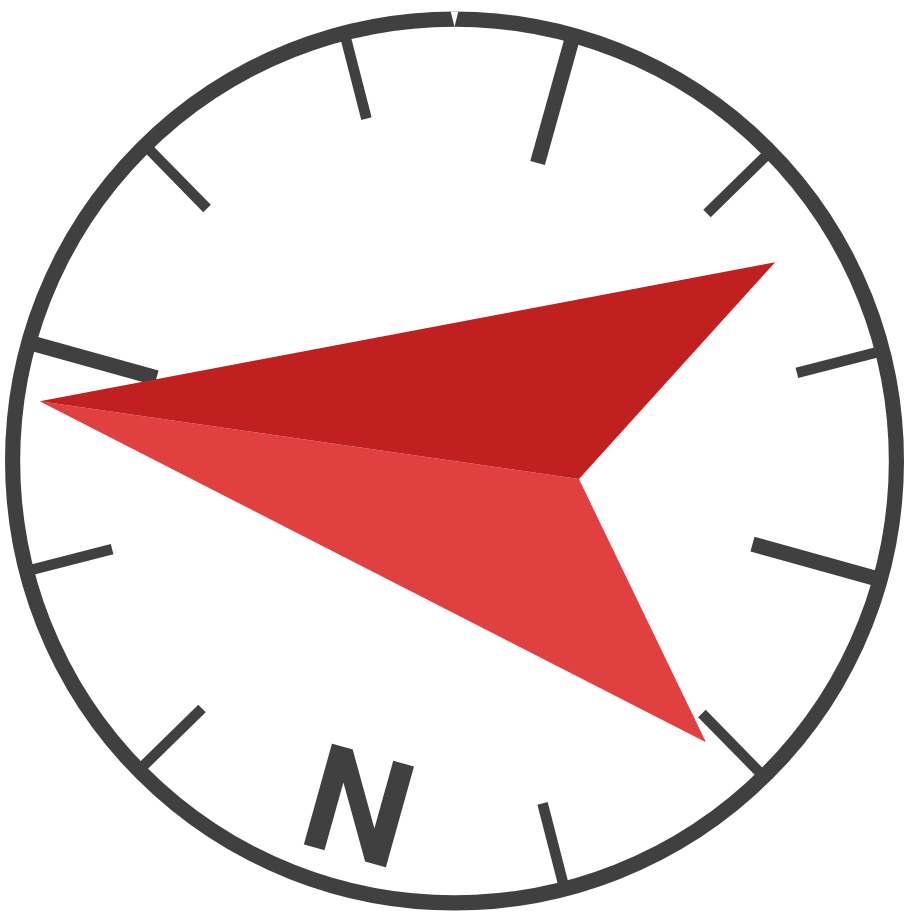
Flèche de Cap ou Trajectoire
Avec le cadran d’arrière-plan, à moins que vous ne choisissiez de garder le nord en haut, le petit triangle plein indique la direction du nord.
Flèche de vent
eInk
Blanc ou Noir

eInk

Blanc ou Noir

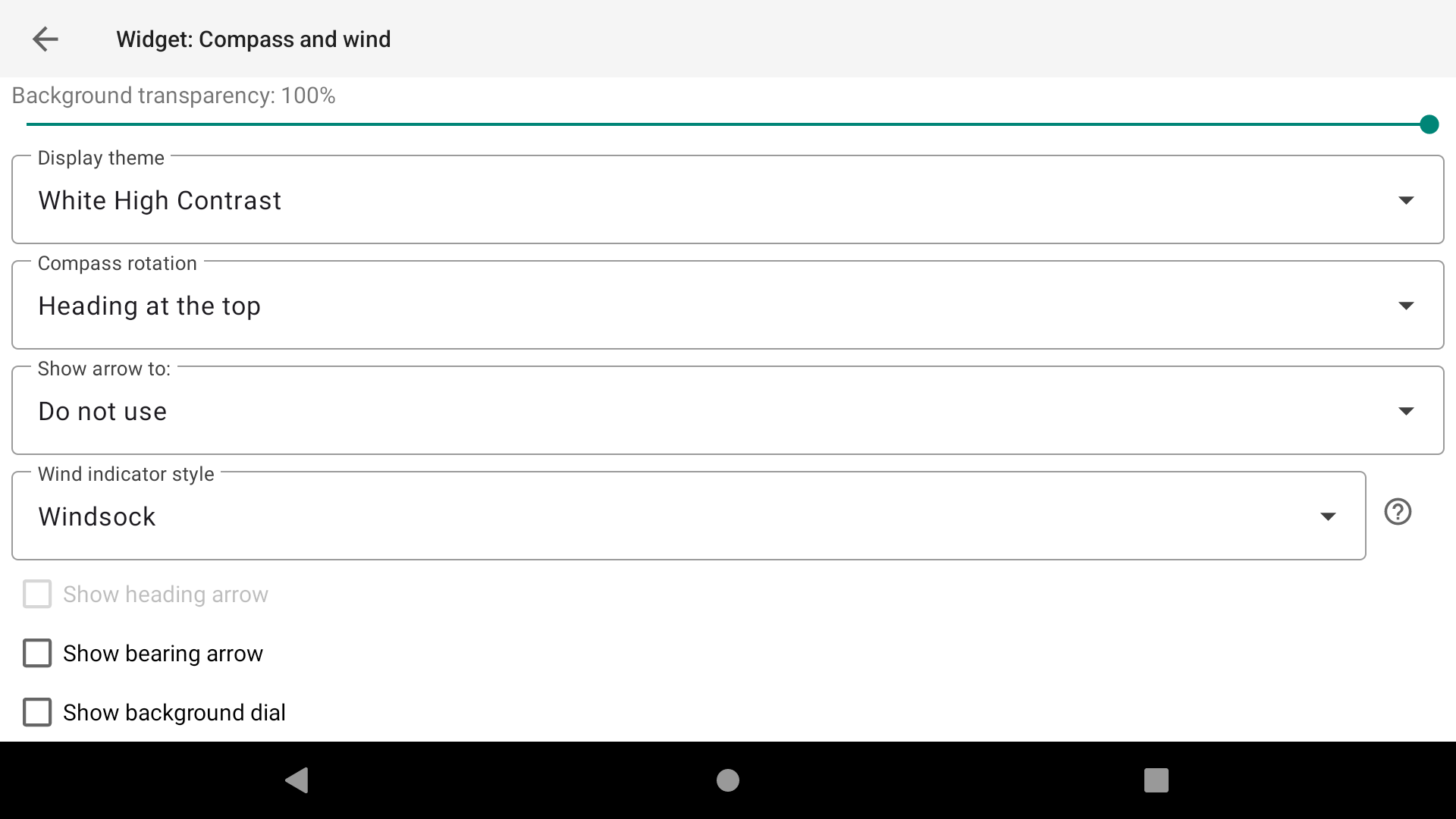
Une fois que vous avez décidé ce que vous voulez afficher, la toute première chose à faire est de définir ce qui se trouve en haut de l'écran.
Rotation du compas. Décidez ce que vous voulez avoir en haut de la boussole.
- Le nord en haut se passe d'explications
- Le cap en haut est utilisé pour toujours avoir ce que vous avez devant vous en haut.
- Trajectoire en haut est utilisé pour toujours avoir où vous allez au sommet.
- Sens de déplacement en haut est utilisée pour avoir votre direction de déplacement en haut. Le but de ce paramètre est d'avoir moins de rotation de la carte que Trajectoire en haut, toujours avec la direction principale vers laquelle vous allez en haut.
Sens de déplacement en haut nécessite d'avoir calculé la direction de déplacement. Ainsi, dans tous les cas, le cadran obtiendra le Nord en haut au début du vol.
Le Sens de déplacement est modifiée lorsque ces DEUX conditions sont remplies
– l'utilisateur a parcouru plus de 3 km en 20 minutes
– l'utilisateur a voyagé en ligne droite pendant environ 2 minutes
… Ensuite, la direction est modifiée, de préférence pour l'angle parcouru s'il ne diffère pas trop de la trajectoire de 2 minutes.

Avec AIR³, la flèche principale indiquant la direction de la cible est incluse sur chaque page et définie pour pointer le point optimisé.
Toutefois, vous souhaiterez peut-être modifier ce paramètre par défaut différemment.

Différents paramètres sont disponibles pour la navigation en fonction de vos préférences:
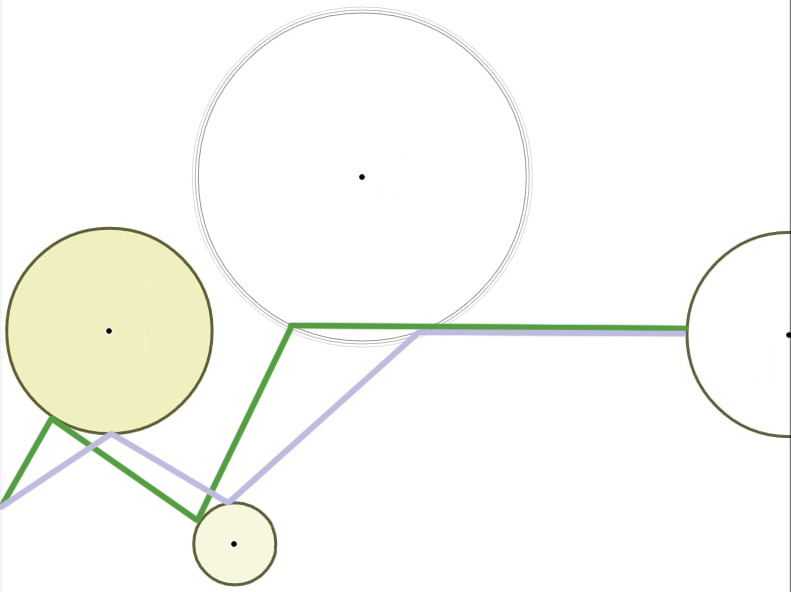
- "Point" indique la direction vers la balise exacte. Ligne verte. La différence avec «Cylindre» est que la distance, la finesse, le temps, etc. sont calculés jusqu'au point / cible. Cependant, une fois que le cercle autour de la balise est atteint, la navigation bascule pour indiquer le point suivant. Pour le widget Boussole, il n’y a aucune différence avec «Cylindre» car seule la flèche est affichée.
- «Point optimisé» indique la direction vers le point optimisé en fonction de votre itinéraire. C'est le paramètre le plus utilisé. Ligne bleue.
- «Cylindre (point le plus proche) indique la direction du point le plus proche de chaque cercle une fois le précédent atteint. Ligne verte. La différence avec le «point» est que la distance, la finesse, le temps, etc. sont calculés jusqu'au cercle à atteindre. Pour le widget Compass, il n'y a pas de différence avec «Point», seule la flèche est affichée.
- "Ne pas utiliser" est le paramètre pour ne pas afficher la flèche indiquant la direction (par exemple pour afficher uniquement la direction du vent).
Le widget Boussole électronique affiche le cap, le vent ou la navigation sous forme de nombre. Le nombre peut être calculé en valeur absolue ou relative à votre trajectoire.
- Trajectoire indique votre trajectiore actuelle, par exemple 0 ° si vous volez vers le nord ou 180 ° si vous volez vers le sud.
- Prochaine balise indique la valeur exacte de la direction vers la prohaine balise. Si la prochaine balise est exactement au sud de votre position, le widget Boussole Electronique affichera 180 ° si vous n'avez pas choisi de calculer «Par rapport à la trajectoire». En sélectionnant «Par rapport à la trajectoire», la valeur de la boussole électronique est calculée en fonction de votre trajectoire actuelle. Si vous volez parfaitement vers le sud (180 °) et que votre prochaine balise est exactement au sud de votre position, la boussole électronique affichera 0 °.
- Direction du vent indique la valeur exacte de la direction du vent calculé. La valeur indique d'où vient le vent. Si le vent souffle du sud, la valeur sera de 180 ° si vous n'avez pas activé l'option «Par rapport à la trajectoire». En activant l'option «Par rapport à la trajectoire», vous obtiendrez la valeur calculée en fonction de votre trajectoire actuelle. Avec un vent venant du sud, volant exactement vers le nord, la valeur calculée sera de 180 °. Si vous faites demi-tour et volez vers le sud, la valeur calculée sera de 0°. En sélectionnant l'option «Par rapport à la trajectoire», une petite flèche vous indiquera si le vent souffle dans la direction vers laquelle vous allez (flèche vers le bas) ou dans la direction opposée à laquelle vous allez (flèche vers le haut).

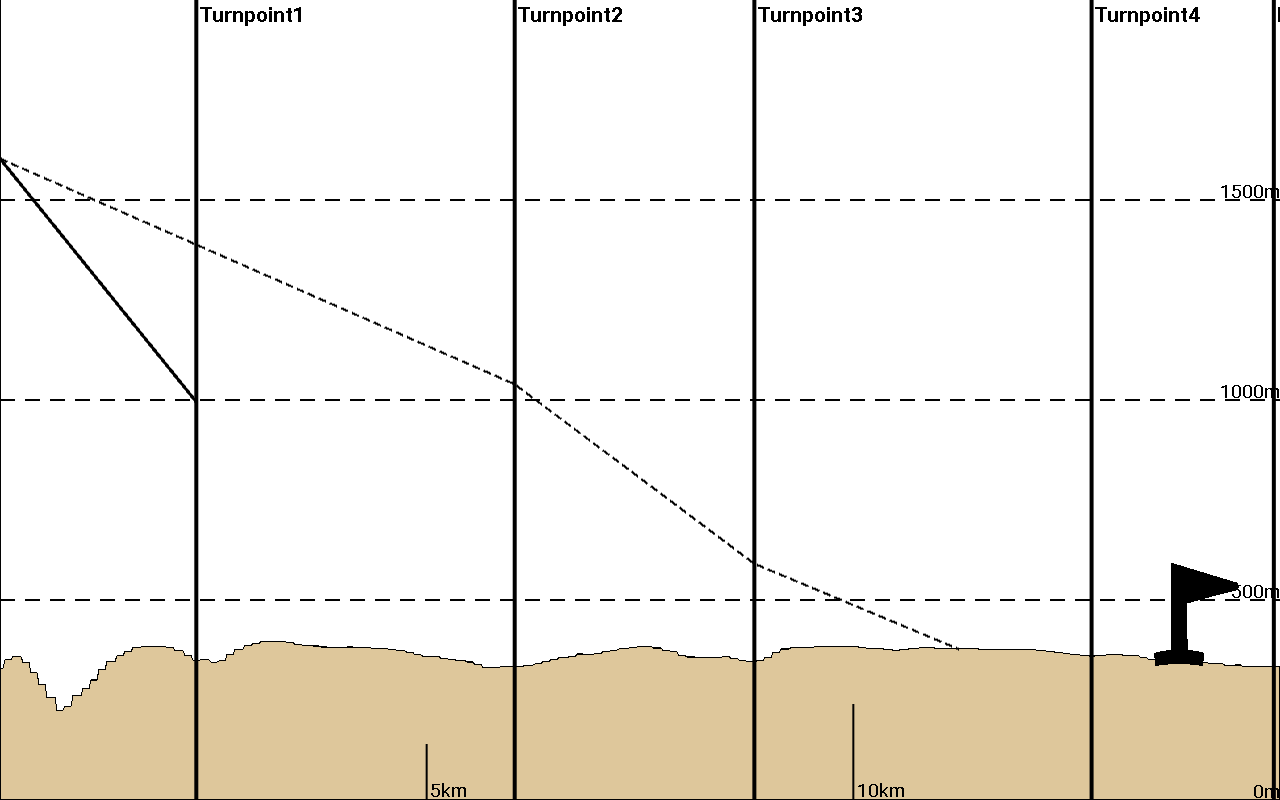
Afficher la trajectoire de descente avec le terrain et les espaces aériens, en partant de la gauche du widget vers la droite
La vue de côté est intégrée à la page AIRSPACE de AIR³, afin de permettre une meilleure compréhension 3D des zones de l’espace aérien devant le pilote, mais également de la manière dont le sol évolue à l’avant.
Le deuxième curseur de la configuration du widget détermine la distance de prévision (de 5 km à 50 km).
Le troisième curseur détermine le temps pris en compte pour faire la moyenne de la finesse (de 0,1 seconde à 1 minute) pour calculer la ligne continue.

Il existe deux types de lignes de finesse dans la vue latérale avec un comportement très similaire à celui du cercle plein et du cercle vide qui apparaissent lorsque vous activez l'option «Marquer la distance de plané» dans la configuration de la carte. Regardez cette option dans Compétition/Carte de la manche ou Xcontest/Carte XC),
Le trait plein est similaire au cercle solide, basé sur la finesse actuelle («basé sur la réalité, non valide lorsque vous montez»).
La ligne en pointillés correspond au cercle vide, en fonction de la finesse théorique, de la vitesse bras hauts et du vent calculé («en fonction des réglages et du vent calculé», valide lorsque vous montez et descendez).
En savoir plus sur la configuration dans Menu/Préférences/Aéronef
Le widget affiche la vue latérale en fonction de la trajectoire actuelle ou de la direction de navigation.
Pour basculer ces directions en avant, maintenez votre doigt sur le widget pendant 1 seconde (appui long) et il passera d’une vue à l’autre.

Le paramètre "trajectoire actuelle" signifie que la vue de côté affiche ce qui se trouve devant le pilote, dans la direction dans laquelle il se dirige. Par exemple, si vous faites face à nord-est avec un vent de nord-ouest fort, en volant vers l'est-nord-est… votre trajectoire actuelle est l'est-nord-est et non au nord-est.
Le widget a un petit œil sur la droite lorsque la vue de côté est définie sur «trajectoire actuelle».

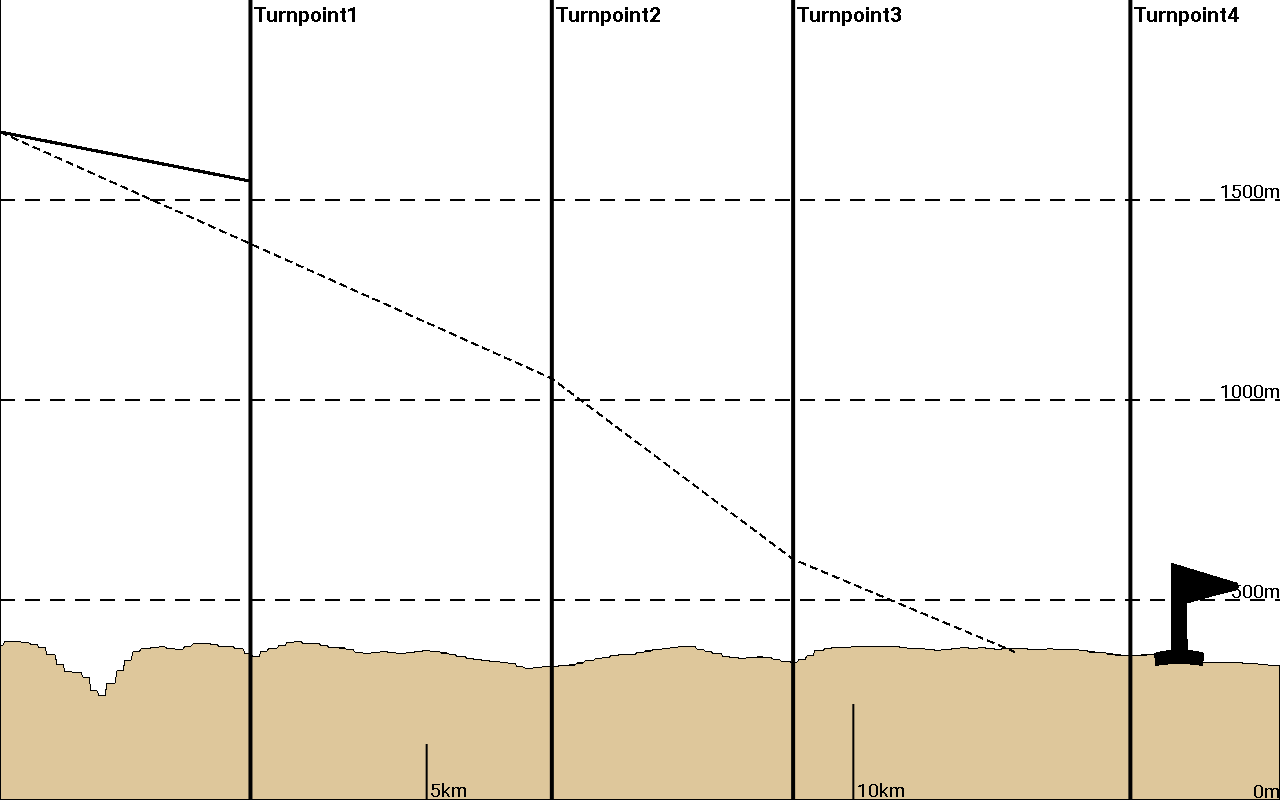
Le paramètre "direction navigation” signifie que la vue de côté affiche ce qui est entre le pilote et la prochaine balise.
Le widget a un petit drapeau à droite lorsque la vue latérale est définie sur «Direction de navigation».
Vue latérale pour une meilleure compréhension de l'espace aérien.
Le widget Vue de coté est très utile pour comprendre en 3D l’espace aérien. Le pilote est toujours à gauche du widget et peut analyser les espaces aériens devant lui. En combinant ces informations avec la carte 2D affichant les espaces aériens (Compétition/Carte de la manche, Xcontest/Carte XC ou AIR/Assistant thermique), le pilote peut clairement comprendre l’espace aérien et éviter toute atteinte.
Grâce aux lignes de finesse, le pilote peut également déterminer comment voler sous la zone de l’espace aérien (voir ci-dessous pour des explications sur les lignes de finesse).
En savoir plus sur la configuration des espaces aériens dans Menu/Préférences/Espaces aériens

Vue latérale pour une meilleure compréhension du relief.
Le widget de vue de côté est très utile pour comprendre en 3D le terrain (élévation). Le pilote est toujours du côté gauche du widget et peut analyser l’élévation devant lui. Les lignes de finessel lui permettent de survoler un col donné ou de vérifier où il atterrira s’il continue à voler dans la même direction.
Bien entendu, pour obtenir de telles informations d'élévation, des fichiers de terrain doivent être installés. AIR³ est livré avec des fichiers de terrain pré-installés en fonction de la région où il est livré. Si vous avez besoin d’installer d’autres fichiers, accédez à Menu/Préférences/Cartes/Terrain avec un accès Internet et téléchargez la zone de vol. Pour plus d'informations, regardez le didacticiel de vidéos relatif aux cartes et aux élévations dans la page des vidéos. En savoir plus à propos des cartes et élévations dans Menu/Préférences/Cartes.

Vue de côté pour la compétition.
Le widget de vue de côté est très utile pour optimiser le plané final afin d'atteindre l'objectif, grâce à une compréhension 3D de ce plané. Le pilote se trouve toujours à gauche du widget et peut analyser où il atterrira exactement en fonction de la ligne de plané.
La vue de côté donne au concurrent une meilleure vue sur les points de virage et le but à atteindre, ainsi que sur les planés. Les lignes verticales correspondent au «point optimisé» du cylindre du ou des points de virage et/ou du goal.
Lisez ci-dessus pour des explications sur les lignes pleines et pointillées. La ligne continue étant basée sur la finesse actuelle, seul le premier segment est logique pour le pilote. La finesse actuelle sera certainement différente une fois que le prochain point de contournement sera atteint, à moins que ce prochain point de contournement ne se trouve dans la même direction. La pente de descente avec des lignes en pointillés est la pente théorique en fonction des réglages et du vent actuel. Cette ligne tient compte de la direction du vent et de sa force. Il s’agit donc d’une bonne indication pour le pilote d’optimiser son vol. Une fois que la dernière étape est celle du goal, la ligne continue est encore plus utile.
Nom de la prochaine balise
En savoir plus sur la configuration de vos balises dans Menu/Navigation

Distance jusqu'à la prochaine balise
La valeur est calculée en fonction de l'itinéraire, du point, du [point optimisé]… ou du point le plus proche (cylindre).
Vous pouvez activer «Utiliser des crochets distinctifs» pour identifier rapidement vos réglages précédents: Point [Point optimisé] (cylindre)
Rappel:
- "Point" indique la direction vers la balise exacte. La différence avec «Cylindre» est que la distance, la finesse, le temps, etc. sont calculés jusqu'au point / cible. Cependant, une fois que le cercle autour de la balise est atteint, la navigation bascule pour indiquer le point suivant.
- Le «point optimisé» prend en compte l’itinéraire vers le point optimisé. C'est le réglage le plus utilisé
- “Cylindre (point le plus proche) prend en compte l'itinéraire jusqu'au point le plus proche du cercle de départ.
Point
Point optimisé
Cylinder


Heure d'arrivée au prochain turnpoint
La valeur est calculée en fonction de l'itinéraire jusqu'au point, [point optimisé]… ou au point le plus proche (cylindre).
Vous pouvez activer «Utiliser des crochets distinctifs» pour identifier rapidement vos réglages précédents: Point [Point optimisé] (cylindre)
Rappel:
- "Point" indique la direction vers la balise exacte. La différence avec «Cylindre» est que la distance, la finesse, le temps, etc. sont calculés jusqu'au point / cible. Cependant, une fois que le cercle autour de la balise est atteint, la navigation bascule pour indiquer le point suivant.
- Le «point optimisé» prend en compte l’itinéraire vers le point optimisé. C'est le réglage le plus utilisé
- “Cylindre (point le plus proche) prend en compte l'itinéraire jusqu'au point le plus proche du cercle de départ.

La vitesse utilisée pour le calcul. Vous pouvez choisir entre vitesse sol, vitesse air avec compensation du vent, vitesse plané avec compensation du vent, vitesse XC.
Vitesse sol: votre vitesse réelle au sol est utilisée. Si vous volez vers un point, vous verrez combien de temps cela prend (le vent est inclus implicitement), mais si vous effectuez des cercles, la valeur changera tout le temps en raison de la vitesse différente du sol, face au vent et dos au vent.
Vitesse air: voir les informations sur le widget vitesse vent dans la section en vol. La vitesse est calculée en fonction de la vitesse sol et du vent calculé. C'est la vitesse qui aurait été indiquée si le pilote avait un capteur de vitesse (tube). Cela dépend en fait de votre position de freinage / d’accélération. La valeur calculée est le moment où vous atteignez le point dans la configuration de freinage/accélération actuels. Si vous volez directement (mais vous n’avez pas besoin de le faire), c’est la différence entre la vitesse sol et la vitesse air.
Vitesse plané: la vitesse en fonction de la configuration de vol, corrigée par le vent. Peu importe votre vitesse de vol, ni votre direction. Il indique à quel moment vous atteignez le point si vous volez directement et à une vitesse basée sur la configuration (par exemple, une vitesse de vol accélérée maximale).
Vitesse XC: temps calculé à partir de la plus grande distance xc (distance sur 3 points de contournement) et du temps de vol. Peut être utilisé pour la chasse au grand triangle FAI.
Selon la configuration, la vitesse peut varier beaucoup. L '«intervalle pour calculer moyenne» permet de calculer en fonction de l'intervalle moyen.
Enfin, vous pouvez choisir le format d'affichage de l'heure…



Hauteur ou altitude d'arrivée à la prochaine balise
La valeur est calculée en fonction de l'itinéraire jusqu'au point, [point optimisé]… ou au point le plus proche (cylindre).
Vous pouvez activer «Utiliser des crochets distinctifs» pour identifier rapidement vos réglages précédents: Point [Point optimisé] (cylindre)
Rappel:
- "Point" indique la direction vers la balise exacte. La différence avec «Cylindre» est que la distance, la finesse, le temps, etc. sont calculés jusqu'au point / cible. Cependant, une fois que le cercle autour de la balise est atteint, la navigation bascule pour indiquer le point suivant.
- Le «point optimisé» prend en compte l’itinéraire vers le point optimisé. C'est le réglage le plus utilisé
- “Cylindre (point le plus proche) prend en compte l'itinéraire jusqu'au point le plus proche du cercle de départ.

La vitesse utilisée pour le calcul. Vous pouvez choisir entre vitesse sol, vitesse air avec compensation du vent, vitesse plané avec compensation du vent, vitesse XC.
Vitesse sol: votre vitesse réelle au sol est utilisée. Si vous volez vers un point, vous verrez combien de temps cela prend (le vent est inclus implicitement), mais si vous effectuez des cercles, la valeur changera tout le temps en raison de la vitesse différente du sol, face au vent et dos au vent.
Vitesse air: voir les informations sur le widget vitesse vent dans la section en vol. La vitesse est calculée en fonction de la vitesse sol et du vent calculé. C'est la vitesse qui aurait été indiquée si le pilote avait un capteur de vitesse (tube). Cela dépend en fait de votre position de freinage / d’accélération. La valeur calculée est le moment où vous atteignez le point dans la configuration de freinage/accélération actuels. Si vous volez directement (mais vous n’avez pas besoin de le faire), c’est la différence entre la vitesse sol et la vitesse air.
Vitesse plané: la vitesse en fonction de la configuration de vol, corrigée par le vent. Peu importe votre vitesse de vol, ni votre direction. Il indique à quel moment vous atteignez le point si vous volez directement et à une vitesse basée sur la configuration (par exemple, une vitesse de vol accélérée maximale).
Vitesse XC: temps calculé à partir de la plus grande distance xc (distance sur 3 points de contournement) et du temps de vol. Peut être utilisé pour la chasse au grand triangle FAI.
Selon la configuration, la vitesse peut varier beaucoup. L '«intervalle pour calculer moyenne» permet de calculer en fonction de l'intervalle moyen.
La valeur indiquée peut être:
- AGL: altitude au-dessus du sol
- AMSL: altitude au-dessus du niveau moyen de la mer
- Perte d'altitude: altitude perdue par le pilote lors du trajet jusqu'à la prochaine balise
La valeur est calculée sur la destination actuelle (par exemple sur le cylindre si vous sélectionnez Cylindre ou le point optimisé décrit ci-dessus).

Section suivante